
Elaborado por: Francisco Montilla, José Luis Rodríguez y María Francia Flores.
CONTENIDO
Para la construcción o implementación de un
sistema de medición, es necesario definir algunos parámetros de diseño
importantes según el tipo de variable a medir, la medición que se desee
realizar y el uso que se le dará al mismo, con el fin de garantizar su funcionalidad.
Control o
detección:
En primer lugar es necesario definir cuál
será el uso que se le pretende dar al sistema de medición, ya que el mismo
puede servir para la detección o visualización del valor de una variable medible
o puede ser destinado para realizar control sobre la misma, en este caso, el
sistema de medición debe acomodarse a las características dinámicas de la
variable a medir.
Cuando se diseña un sistema de medición para
la detección u observación, dichos sistemas se caracterizan por tener una
respuesta muy lenta ante cambios bruscos en la variable medida, sin embargo
debido al fuerte filtrado, poseen una relación (señal/ruido) excepcional,
entregando una señal muy limpia y estable. En la Fig. 1, se observa la
respuesta de un sistema de medición de corriente altamente filtrada para la observación
mediante un display.

Figura 1. Respuesta
para un circuito de medición de corriente destinada a la observación mediante
un display.
En la Fig. 1, se observa que la respuesta del
sistema de medición es muy lenta para su uso en un sistema de control que
requiera velocidad de respuesta (sistemas muy dinámicos), pero como se mencionó
anteriormente, es ideal para ser mostrada en un elemento de visualización o
para ser utilizada por un sistema de control como señal de detección cuando la
variable alcanza un determinado valor de interés. Por lo tanto, el sistema de
medición tiene una respuesta pobre a los cambios bruscos, pero tienen buena
estabilidad cuando el proceso se encuentra en estado estable, los cuales los
hacen ideales para variables lentas.
Por otro lado, los sistemas de medición
destinados a ser utilizados en sistemas de control a lazo cerrado se
caracterizan por tener una respuesta muy cercana a la variable medida. Es
decir, la salida del sistema de medición se solapa con la variable medida, de
manera que éste no genere retrasos significativos al algoritmo de control. Ante
un escalón, exhibe un comportamiento subamortiguado.
En la práctica, los sistemas de medición para
procesos muy dinámicos siempre tienen un porcentaje de retraso debido al
proceso de filtrado que por lo general es muy bajo. Otro factor importante es
el sensor utilizado, el cual presenta un cierto grado de retraso que es propio
del mismo en función de su construcción. En la Fig. 2 se observa un sistema de
medición destinado al control de corriente.

Figura 2. Respuesta para un circuito de
medición de corriente destinada al control.
Como se puede apreciar en la Fig. 2, la
respuesta del sistema de medición persigue a la variable medida, sin embargo,
debido al bajo filtrado la misma presenta una relación (señal/ruido) más
deficiente. También se observa un pequeño sobre impulso y un ligero retraso en
el flanco de subida, los cuales pueden ser atribuidos a los elementos
(componentes electrónicos) que conforman el sistema de medición.
Rango de medición y zona de guarda:
Otro parámetro de diseño a tomar en cuenta es
el rango de medición. Este parámetro a veces resulta ser algo confuso respecto
a cuánto se debe medir. En la mayoría de las variables medibles en un proceso,
es común observar que la misma siempre permanece en un punto o valor central, al
cual se le llama punto de operación. También se tienen variables que
experimentan una variación muy amplia en el transcurso del proceso. Dependiendo
del caso, se puede definir un rango de medición más o menos acorde al proceso,
con el fin de establecer cuáles son los valores útiles del proceso al cual se
le hace la medición. Adicional a eso, se debe respetar una zona de guarda como
se indica en la Fig. 3.

Figura 3. Zona de guarda para un sistema de medición.
La zona de guarda es un intervalo del rango
de medición del sistema, donde la variable esta fuera de su rango habitual de
trabajo. Por lo general, se le da una amplitud mínima igual a la mitad del
rango de variación de la variable. Si el sistema de medición es bidireccional
se deben definir dos zonas de guarda.
Las zonas de guarda son muy importantes para
recuperar la operatividad de un proceso industrial cuando el mismo se ha salido
de su zona de trabajo, sin la necesidad de suspender o detener el proceso en
sí. Lo importante es que se pueda mantener una medición constante de forma
ininterrumpida para realizar las acciones necesarias para estabilizar el
proceso, por lo tanto, se debe entender que el rango de medición debe abarcar,
no solamente los valores de interés para el proceso, sino que además, debe
contemplar los valores que pudiera alcanzar la variable antes que el proceso
colapse o se destruya.
Pruebas para un sistema de medición:
- Prueba de ruido: los circuitos medición para la observación, generalmente poseen un fuerte filtrado para tener una señal muy limpia y estable. Una forma práctica de verificar que efectivamente el filtro (o los filtros) diseñados cumplan con la función de filtrar las frecuencias seleccionadas, es introducir en la entrada del circuito de medición una señal periódica, generalmente una senoidal, con un voltaje de offset igual a la mitad de la amplitud máxima de entrada e ir variando la frecuencia y la amplitud de la misma. Variando la amplitud, se puede conseguir el paramento (señal/ruido). Simplemente se va aumentando la amplitud de la señal hasta que ésta se pueda apreciar en la salida del circuito de medición. La amplitud así obtenida será la tolerancia máxima al ruido del circuito. Una segunda prueba que se puede realizar, es variar el voltaje de offset con la intención de observar cómo se comporta el circuito de medición para diferentes valores de la señal medida. Se puede variar la amplitud para comprobar que el rechazo del ruido es igual para diferentes valores de la señal medida. En la práctica, esto no se cumple y el rechazo al ruido varía en función de la amplitud de la señal de entrada. La realización de esta prueba produce lo que llaman perfil de ruido de circuito.
- Prueba de la mínima variación medible: esta prueba tiene como finalidad comprobar que el circuito de medición, sea capaz de medir el mínimo valor que se necesite medir. Para esta prueba es conveniente utilizar una señal de prueba del tipo rectangular. La frecuencia para esta prueba no es importante, simplemente seleccione una frecuencia que le permita al circuito de medición llegar a estado estable. La idea es reducir la amplitud hasta que no se observe nada en la salida. El valor obtenido será el valor frontera, valores por debajo de él no serán medidos por el circuito de medición.
- Prueba al escalón: esta prueba tiene como objetivo caracterizar el circuito de medición, es decir, obtener los valores de tiempo de subida, máximo sobre impulso, tiempo de estabilización, entre otros. De esta prueba se puede obtener la función de transferencia del circuito de medición.
- Precisión y exactitud: esta prueba persigue determinar qué tan fiable es el sistema de medición. Lo ideal es que el mismo sea preciso y exacto, pero en la práctica es suficiente que sea preciso. La exactitud se puede lograr agregando un circuito compensador que lleve la medición al punto deseado. Para realizar esta prueba se puede utilizar un escalón cuya amplitud sea un valor de interés para el proceso, y esperar a que se estabilice la señal de salida. Al hacer varias pruebas se obtiene un número de datos, y a través de un cálculo estadístico de desviación estándar se obtiene la campana de Gauss. Si el sistema es preciso dicha campana debe ser angosta y si el sistema es exacto, el valor medio (el pico de la campana) debe superponerse al valor medido. En la Fig. 4 se observa la campana de Gauss.

Figura 4. Campana de Gauss.
1)
¿Cómo
se determina que tipo de medición se debe realizar en un sistema?
Respuesta:
el tipo de medición a realizar va a depender de la función del sistema, si es
para observación o control.
2)
¿Bajo
cuál criterio se debe diseñar el filtro, si se diseña un circuito de medición
para la observación?
Respuesta:
no hay un criterio definido en cuanto al diseño del filtro, sin embargo, se ha
generalizado el uso de filtro pasa bajos con frecuencias de corte de inferiores
a un hertz.
3)
¿En
un circuito de medición se debe amplificar la señal de entrada para luego
filtrar?
Respuesta:
No, nunca de debe amplificar la señal de entrada, ya que esto amplificaría
también al ruido.
4)
¿Se
pueden implementar dos circuitos de medición: uno para control y otro para la
observación?
Respuesta:
Si, de hecho es muy común en lo equipos comerciales encontrar un circuito de
medición con dos salida, una para el control y otra para la observación
mediante un display.
5)
¿Hasta
qué punto es conveniente filtrar en un circuito de medición?
Respuesta:
si el circuito es para control, se debe filtrar hasta la frecuencia fundamental,
que es la señal base cuando se observa en un analizador de espectro. Si es para
la observación es común implementar filtros con frecuencias de corte de un hertz.
PRÁCTICA
A continuación se presenta un ejemplo de
diseño de un sistema de medición para una máquina de soldar con control
electrónico de corriente. Estos equipos representan un desafío en cuanto al
diseño del sistema de medición debido al ruido eléctrico que se produce en los
procesos de soldadura. La variable a controlar será la corriente de salida del
equipo, la cual es una corriente de corto circuito cuyo control requiere un
sistema de medición con una respuesta rápida.
En la Fig. 5 se muestra el circuito de la
maquina soldadora, la simulación se realizó en el Software Proteus versión 8.5.
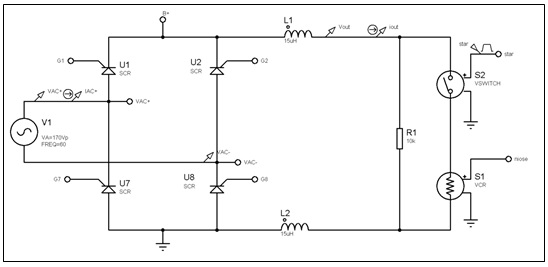
Figura 5. Circuito de potencia de una máquina de soldadura.
Como se aprecia en la Fig. 5, el equipo de
soldadura se basa en un convertidor AC/DC monofásico totalmente controlado con
una alimentación de 42.2 Vpico o 30 Vrms, éste es el voltaje de salida del
transformador de entrada de la mayoría de los quipos de soldadura monofásicos.
Las bobinas L1 y L2 están para simular la inductancia de los cables. S2 es un
switch controlado por voltaje, y es utilizado para simular la acción del
soldador de tocar el metal con el electrodo para iniciar el arco de soldadura.
S1 es una resistencia controlada por voltaje y es utilizada para emular la
dinámica de la soldadura. Su resistencia varía entre 0.1Ω y 0.00001Ω en función
de una señal aleatoria que representa el ruido producido por la acción de
soldadura.
RESULTADOS
En la Fig. 6 se presenta una simulación de la
corriente de salida en un intervalo de 500ms de duración. Esta simulación se
hizo a la máxima potencia que puede entregar el equipo sin un controlador, es
decir, en modo manual a lazo abierto colocando el ángulo de disparo en 0º, que
representa la potencia máxima en el convertidor AC/DC. Como se observa en la
Fig. 6, los picos de corriente llegan hasta 200A, lo cual es sumamente alto.
Con esta prueba se puede establecer como valor máximo de medición 200A.
Sin embargo, el equipo está pensado para
trabajar hasta un máximo de 100A que es la corriente de trabajo máximo. Además,
la salida es unipolar, es decir, el equipo no invierte el sentido de la
corriente, por lo tanto, el sistema de medición también lo será.

Figura 6. Corriente de salida del equipo a la máxima potencia.
Ya que el límite máximo de medición será 200A
y la corriente de trabajo será de 100A se deduce que la zona de guarda será de
100A. Una vez definido el intervalo de medición, se puede iniciar el diseño con
la elección del sensor de corriente.
Para simplificar el diseño se utiliza una
resistencia tipo shunt para la medición de corriente. Estas resistencias se
calculan de forma tal, que la caída de potencial entre sus terminales debido al
paso de la corriente, sea por el orden de los milivoltios. Si se fija una
corriente de 200A como tope de medición, se debe elegir qué valor de voltaje en
la shunt se desea usar para representar dicho valor. Se debe elegir un valor de
100mV para este caso, ya que es una magnitud que es cómoda de manejar y es
estandarizada.
Una vez establecido el valor de entrada al
circuito de medición, se puede calcular la resistencia de la shunt, si se llama
Iout a la corriente de salida y Vshunt al voltaje en el
sensor:

Este valor será utilizado para la simulación.
En la práctica, dichos sensores resistivos son comerciales y vienen para una
variedad de valores de corriente y caídas de voltaje. Es este link: http://www.rammeter.com/ram-meter-b200a100-200-amp-100-dcmv-dc-current-shunt.php, se muestra un fabricante de dichos sensores.
En la Fig. 7 se muestra el circuito con la
resistencia shunt instalada y en la Fig. 8 se muestra la simulación de la señal
obtenida en el circuito.

Figura 7. Circuito con sensor shunt.

Figura 8. Gráfica del sensor de corriente.
Una vez seleccionado el sensor, se debe
encontrar la manera de tomar una muestra del mismo para su acondicionamiento. A
simple vista se observa que no es posible realizar la medición, con referencia a
la tierra del circuito de medición, ya que, esto significa conectar la salida
positiva del sistema de potencia, a la tierra del circuito de medición, lo cual
no es muy conveniente. La solución es realizar la medición en flotación, para ello
se utiliza un amplificador diferencial. En la Fig. 9 se muestra el circuito a
utilizar.
Para garantizar una alta impedancia de
entrada, las resistencias R7, R8, R9 y R10 tendrán un valor de 2MΩ. La ganancia
del amplificador es conveniente que sea unitaria para no amplificar el ruido.
El operacional seleccionado es el OP07A, el cual está diseñado para trabajar
con señales muy pequeñas. Los diodos D1 y D2 son elementos de protección para
la entrada del amplificador.

Figura 9. Amplificador diferencial con ganancia unitaria.
En la Fig. 10 se presenta la simulación del
circuito.

Figura 10. Salida del amplificador diferencial.
En este punto, es aconsejable realizar una
primera etapa de filtrado para mejorar la relación (señal/ruido) en la
siguiente etapa de amplificación. En la Fig. 11 se aprecia un zoom de la señal
de salida del amplificador diferencial. Se observa que la señal es periódica, y
cuyo periodo al realizar una medición de cresta a cresta es de 8.5ms, el
inverso de este valor indica la frecuencia fundamental de la señal, la cual es.
117.64Hz.

Figura 11. Zoom en la señal de salida del amplificador diferencial.
Luego, se diseña un filtro
pasa bajo cuya frecuencia de corte será un poco menor a la frecuencia
calculada, por lo general un 10% menos, esto con el fin de garantizar la
eliminación de las componentes de alta frecuencia y poder recuperar la señal de
interés. Se elige una frecuencia de corte de 100Hz para el cálculo del filtro,
en la Fig.12 se observa el filtro diseñado y en la Fig. 13 la simulación del
filtro. El cálculo del filtro es el siguiente:
Frecuencia de corte fc=100Hz;
Capacitor C=100nf



Figura 13. Salida del filtro.
El opam U5 funciona como seguidor. En la
Fig.14 se observa un zoom de la salida del filtro, en ésta se observa como se
ha logrado recuperar la señal original, que es la forma de onda que entrega un
convertidor AC/DC para un ángulo de 0º.

Figura 14. Salida del filtro en zoom.
Ahora es posible realizar una amplificación
de la señal de medición para que tenga un uso práctico. En este punto es donde
se toma la decisión sobre el tipo de medición que se necesita realizar. Si la
medición fuera para la observación sería necesario realizar una amplificación
en RMS o promedio, es decir, realizar un fuerte filtrado. Sin embargo, en este
caso particular, como la medición está destinada al control sobre el equipo, el
sistema de medición debe entregar el valor instantáneo de la variable
controlada, como el filtrado realizado ha permitido recuperar la señal
fundamental, solo es necesario amplificar a un valor adecuado.
Como el tope máximo de medición es 200A, ésta
puede ser representada por 2V. Se debe tener presente que siempre, es
conveniente amplificar lo menos posible cuando se está en presencia de procesos
que son altamente ruidosos.
En la Fig. 13 se aprecia que la salida del
filtro tiene una amplitud aproximada de 75mV, entonces se utiliza este valor
como entrada del amplificador.

Si se define a R14 = 25kΩ, se despeja a R13
sabiendo que Vout = -2V; Vin = 75mV, se tiene:

En la Fig. 15 se presenta el circuito
amplificador.

Figura 15. Amplificador inversor.
Un pequeño inconveniente en el circuito de un
amplificador inversor, es que la salida será negativa. Para solucionar esto,
simplemente se invierte la conexión del sensor a la entrada del circuito de
medición. La simulación se presenta en la Fig. 16.
A simple vista pareciera que la medición es
muy ruidosa, sin embargo, cuando se cierra el lazo de control, el controlador mantiene
una corriente estable, produciendo un efecto de filtrado.

Figura 16. Simulación salida del circuito de medición.
En la Fig. 17 se observa la señal del
circuito de medición, cuando el mismo es utilizado para realizar control a lazo
cerrado. En este caso la simulación se realizó desde t=0s hasta t=1.5s para
observar por más tiempo el funcionamiento del circuito.

Figura 17. Salida del circuito de medición en lazo cerrado.
Como se puede apreciar en esta figura, al
momento de iniciar la soldadura, la corriente de corto circuito busca
incrementarse hasta llegar al tope de medición, se observan por tanto picos muy
pronunciados de corriente. Después de los 0.6s el controlador comienza a
estabilizar la corriente observándose picos ocasionales, muy común en soldadura,
los cuales son provocados mayormente por el pulso del soldador.
En la Fig. 18 se muestra la corriente que
entrega el equipo (máquina de soldar).

Figura 18. Corriente de salida del equipo (máquina de
soldar).
Por último, en la Fig. 19 se presenta una
simulación de la corriente de salida cuando al circuito de medición se
implementado con una mayor capacidad de filtrado.

Figura 19. Corriente de salida con mayor filtrado en el circuito de
medición.
Lo que se aprecia en la Fig. 19 son esos
espacios en blanco donde la corriente es cero. Estos espacios son producido por
la lenta respuesta del circuito de medición, donde el controlador se queda
esperando a que éste reaccione, bloqueando el convertidor y haciendo que la
corriente sea cero. El circuito final resultante se muestra en la Fig. 20.

Figura 20. Circuito de medición final.
De la práctica desarrollada, se comprende la
importancia de definir bien los parámetros de diseño de los circuitos de
medición, para que los mismos puedan realizar con éxito la función encomendada.
También es importante saber acerca del proceso que se desee medir, en este
punto, los conocimientos y la experiencia del ingeniero juegan un rol
fundamental.
BIBLIOGRAFÍA
[1] R. Pallás. Sensores y Acondicionadores de señal. [En
línea]. Disponible en:
[2] Introduction to Circuit Measurement. [En línea]. Disponible en: http://electriciantraining.tpub.com/14175/css/Introduction-To-Circuit-Measurement-15.htm
[3] Basic Measurements with Electric Circuits. [En línea]. Disponible en: http://www.yildiz.edu.tr/~uzun/LDT_PDF/PLDT_LAB01E2.pdf
[4] Current Shunt & Voltage Measurement Reference Design for EV/HEV
Automotive Battery Monitoring. [En línea].
Disponible en: http://www.ti.com/lit/ug/tidua81/tidua81.pdf
[5] Kelvin (4-wire) Resistance Measurement. [En línea]. Disponible en: https://www.allaboutcircuits.com/textbook/direct-current/chpt-8/kelvin-resistance-measurement/
No hay comentarios:
Publicar un comentario